Warman Challenge
Project FAMINE: Autonomous Seed Pod Collector
Executive Summary
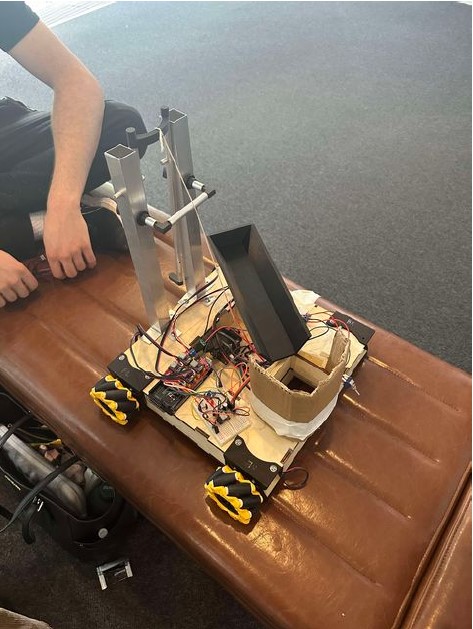
Designed and manufactured a scale autonomous robot for the Warman Design Challenge. The objective was to navigate a 2400mm x 1200mm track, collect six 57g "seed pods" (tennis balls), and deposit them into an elevated incinerator within strict time constraints.
Mechanical Artifacts & Prototyping
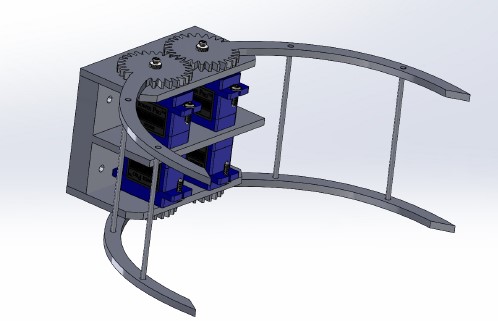
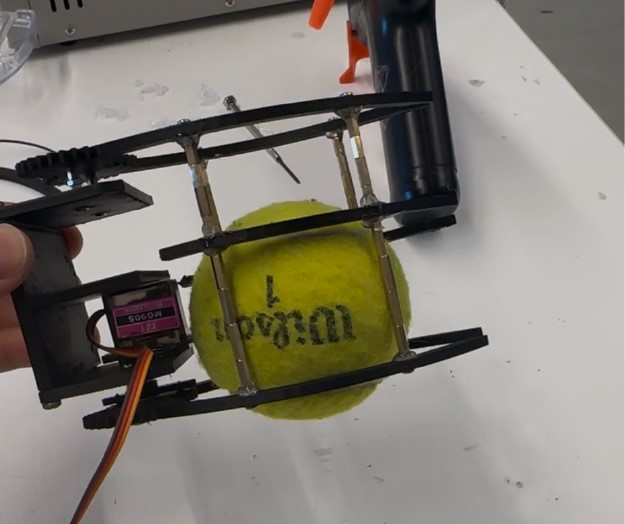
- Motorised Claw: Designed a custom end-effector powered by an MG90S servo. Upgraded from an initial 4-motor SG90 design to a single-motor configuration outputting 2.2kg/cm of torque, effectively gripping the 57g payloads without stripping gears.
- Custom Drive Connectors: Engineered and 3D-printed PLA friction-fit connectors to mesh NEMA 17 stepper motors with mecanum wheels. Iterated the design by widening the base to withstand 5.90MPa of torsional shear stress, eliminating previous cracking issues.
- Telescopic Arm: Developed a 400mm extension arm to reach elevated pods and retract them safely into the chassis' onboard storage hopper.
Embedded Control
Programmed the robot's autonomy using C++ on an Arduino microcontroller. Utilized the AccelStepper library for precise, multidirectional mecanum kinematics and the Servo library for synchronized manipulator control during collection and depositing phases.